

APOD Collection
The Astronomy Picture of the Day (APOD) is based upon work supported by NASA under award No. 80NSSC17M0076. Each day a different image or photograph of our fascinating universe is

IOTD Collection
The “AstroBin Image of the Day ” (IOTD) is a long-running system to promote beautiful, interesting, peculiar or otherwise amazing astrophotography. Its goal is to promote the output of the

Home Page Collection
Our home page banner is left for our user’s photos! The top banner is planned to be changed every two or four weeks. You can send your works to our

Terry Hancock’s gallery
For many years, Terry Hancock imaged from his backyard, but upon retirement, he managed the Grand Mesa Observatory in Colorado, where he currently serves as Director. 【”The Golden State” Nebula
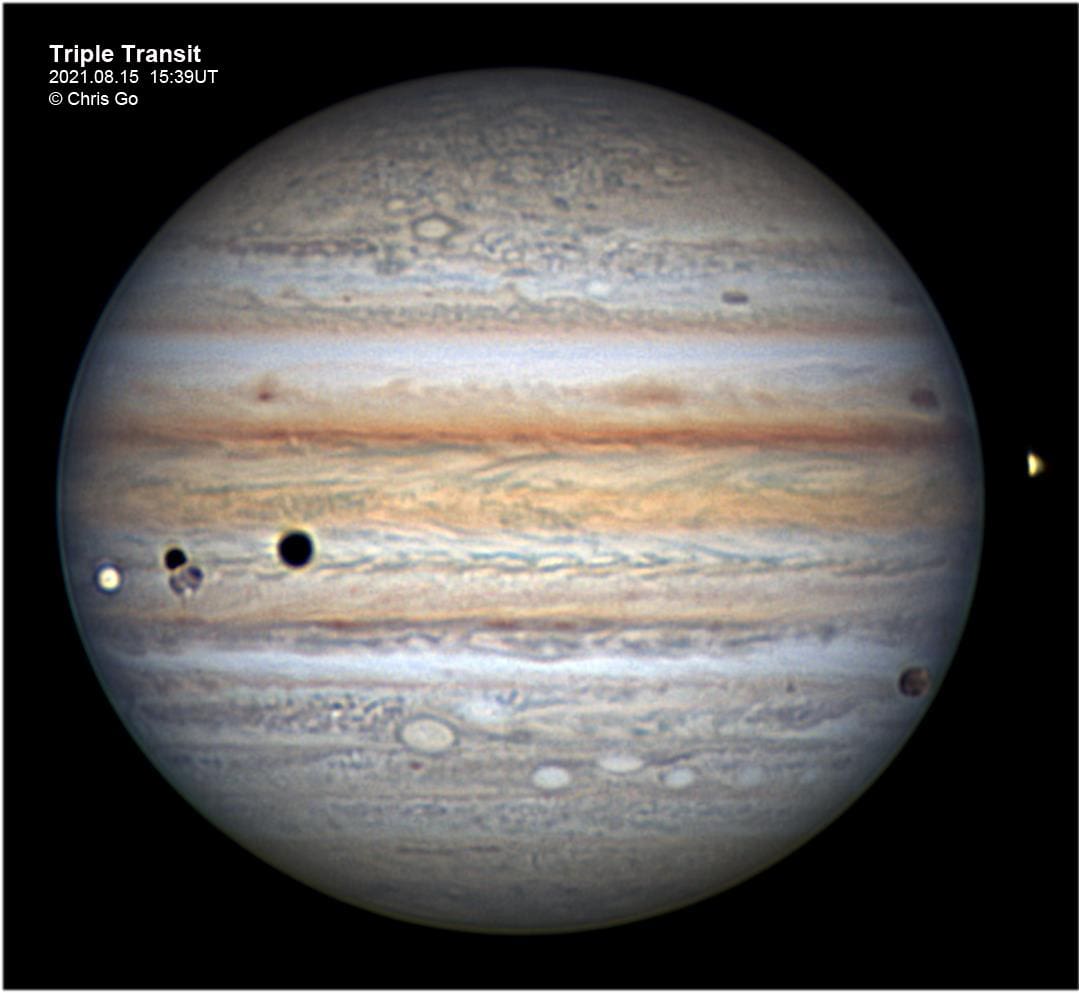
Christopher Go’s gallery
Christopher is an amateur astronomer who lives on the island of Cebu, Philippines now. In 2015, the International Astronomical Union officially designated Asteroid 2000 EL157 to 30100 Christophergo. This asteroid

Kevin Morefield’s gallery
Kevin Morefield:” Finding beauty in the night sky is my passion. Reading the works of Clark and Asimov in my youth I dreamed of what was out there in space.
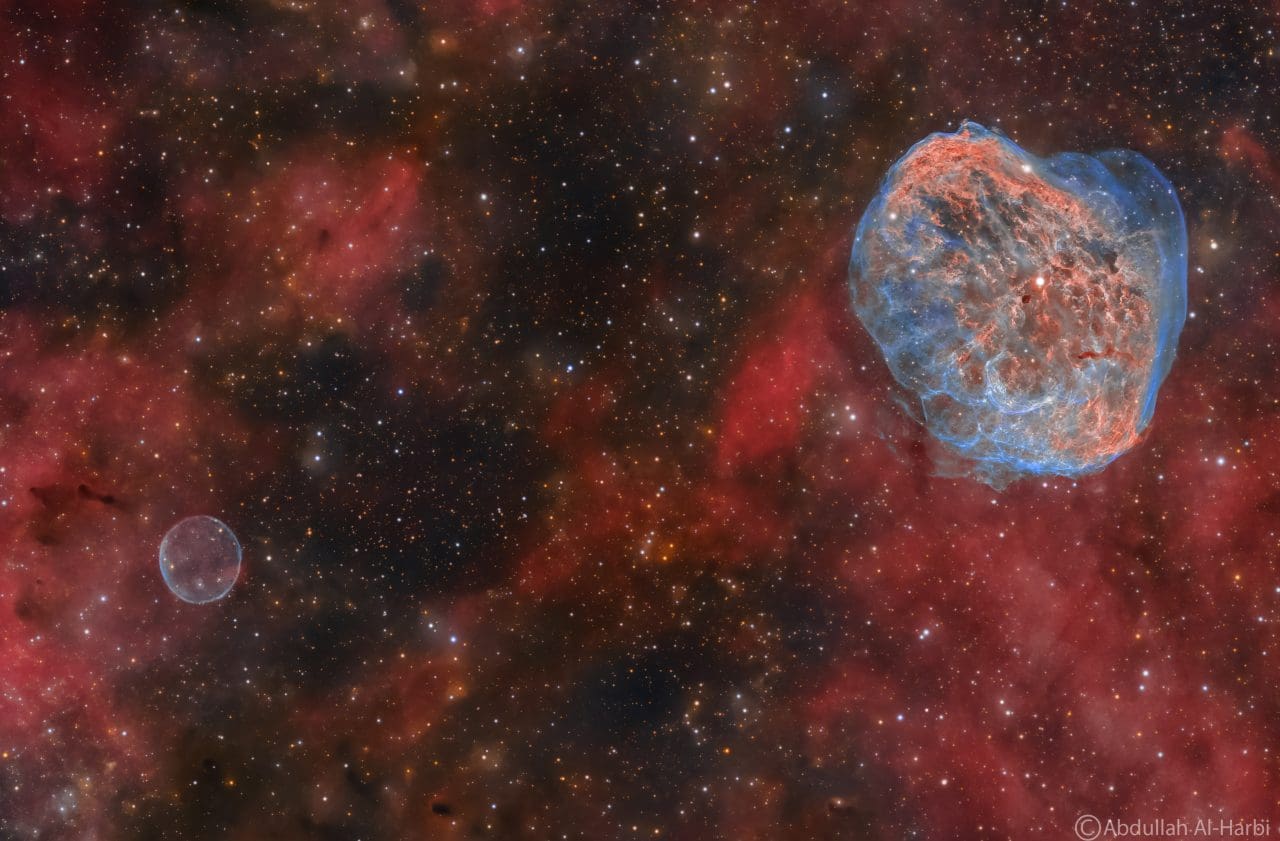
Abdullah Alharbi’s gallery
NGC 6888 and bubble soap nebula (APOD 20230904) Imaging Telescopes or Lenses: Askar 600 Imaging Cameras: QHY268M Mount: iOptron CEM40 Filters: Chroma 36mm LRGB Ha OIII Frames: Ha 300s*126

Yannick Akar’s gallery
M16 – The Eagle Nebula ( NASA APOD 2022 Oct 04) Imaging Telescopes Or Lenses: Celestron RASA 11″ V2 Imaging Cameras: QHYCCD QHY268PH M Mounts: iOptron CEM60 Frames: Baader